Пущенная на воды озера Маггиоре, лодка с надстроенными «крыльями», созданная итальянским изобретателем, достигла небывалой для 1906 года скорости – 68 км/ч. Двигатель лодки обладал мощность всего 60 лошадиных сил и приводил в движение два воздушных винта, вращающихся в противоположных направлениях.
Принцип действия
 Подводные крылья – это устройства, входящие в конструкцию корпуса корабля, выполненные в виде крыльев (отсюда и название). Их основным назначением является уменьшение силы трения и сопротивления воды, корпусу корабля, а также уменьшение осадки судна. Принцип действия подводных крыльев, аналогичен крыльям летательных аппаратов. При больших скоростях, за счет изгиба крыла, корабль поднимается над водой. Погруженными остаются лишь крылья и двигатели. Оптимальная сила выталкивания судна зависит от его скорости. Так как плотность воды больше плотности воздуха в 800 раз, то и площадь крыла, как и скорость корабля, при той же силе выталкивания, что и у самолета, будет меньше в 800 раз.
Подводные крылья – это устройства, входящие в конструкцию корпуса корабля, выполненные в виде крыльев (отсюда и название). Их основным назначением является уменьшение силы трения и сопротивления воды, корпусу корабля, а также уменьшение осадки судна. Принцип действия подводных крыльев, аналогичен крыльям летательных аппаратов. При больших скоростях, за счет изгиба крыла, корабль поднимается над водой. Погруженными остаются лишь крылья и двигатели. Оптимальная сила выталкивания судна зависит от его скорости. Так как плотность воды больше плотности воздуха в 800 раз, то и площадь крыла, как и скорость корабля, при той же силе выталкивания, что и у самолета, будет меньше в 800 раз.
Подобные суда способны перемещаться по воде в двух режимах:
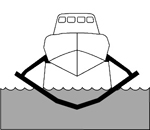
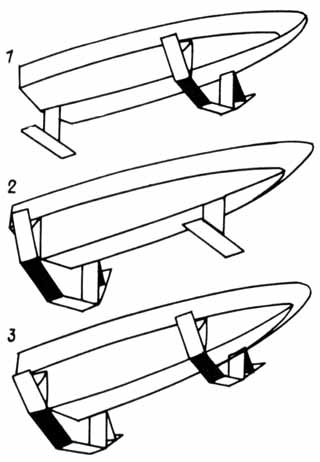
- В режиме обычного корабля. Каждый тип судна на подводных крыльях имеет расчетную скорость, при которой выталкивающая сила поднимает корпус корабля над водой (аналогично взлетной скорости самолета). До достижения этой скорости, судно погружено в воду, в соответствии с законом Архимеда. При этом сильно увеличивается осадка, так как крылья увеличивают ее. Для решения этой проблемы, применяются складные крылья и поднимающиеся винты.
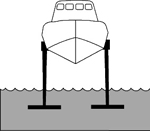
- В режиме судна на подводных крыльях. Достигая скорости выталкивая, корабль поднимается над водой, за счет уменьшения силы трения, скорость резко возрастает, а осадка становиться минимальной.
Существуют два основных типа подводных крыльев:
 Крыло частично погруженное в воду. При увеличении площади соприкосновения с водой подобных крыльев, увеличивается и создаваемая ими выталкивающая сила. Благодаря этому свойству, судно более устойчиво при возникновении волн. Для улучшения плавности движения корабля при сильном волнении, частично погруженные крылья можно оснастить закрылками с автоматическим управлением.
Крыло частично погруженное в воду. При увеличении площади соприкосновения с водой подобных крыльев, увеличивается и создаваемая ими выталкивающая сила. Благодаря этому свойству, судно более устойчиво при возникновении волн. Для улучшения плавности движения корабля при сильном волнении, частично погруженные крылья можно оснастить закрылками с автоматическим управлением.
 Полностью погруженное (U-образно) крыло. Управление выталкивающей силой при полном погружении крыла в воду, осуществляется путем изменения угла атаки (поворот крыла целиком) или отклонением закрылок, которые расположены на неподвижном крыле, вдоль задней кромки. Регулирование положения судна над водой, обеспечивается системой автоматического управления. Компьютер управления, отслеживает положение судна и автоматически осуществляет его балансировку.
Полностью погруженное (U-образно) крыло. Управление выталкивающей силой при полном погружении крыла в воду, осуществляется путем изменения угла атаки (поворот крыла целиком) или отклонением закрылок, которые расположены на неподвижном крыле, вдоль задней кромки. Регулирование положения судна над водой, обеспечивается системой автоматического управления. Компьютер управления, отслеживает положение судна и автоматически осуществляет его балансировку.
Система управления должна обладать очень высоким коэффициентом надежности, так как при ее отказе, судно с U-образным крылом может перевернуться.
Подводные крылья могут располагаться по-разному, как относительно друг друга, так и относительно корпуса судна.
Всего существует три типа, применяемых в практике, компоновок подводных крыльев:
- Расположение крыла аналогично авиационному (самолетная компоновка). При таком положении, крыло больших размеров (главное), расположено перед метацентром корабля, а крыло меньших размеров (второстепенное), находится позади центра тяжести. Крылья такого типа применяются на малых судах, с небольшой осадкой.
- Расположение крыла по схеме – «утка». Такая конструкция предполагает размещение меньшего крыла перед основным (напоминая по форме утку). Применяются аналогично «авиационным».
- Тандемная схема. Тандемные крылья равнозначны между собой и расположены спереди и сзади метацентра судна, на одинаковом от него расстоянии. Подобная схема используется в конструкции крупных, мореходных судах на подводных крыльях.
Двигательные установки судов на подводных крыльях
Для выхода на глиссаду (то есть достижения скорости, достаточной, что бы «встать» на крылья), судно должно обладать мощным двигателем. На судах с подводными крыльями применяются двигатели внутреннего сгорания (дизельные) и газотурбинные установки. Совместно с ними применяются водометные и винтовые движители. Крупнотоннажные суда оснащаются движителями обоих типов, переключающихся в зависимости от режима движения корабля, чаще всего они приводятся в действие газотурбинными установками.
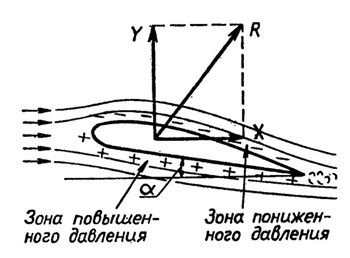
Особенности движения крыла в воде
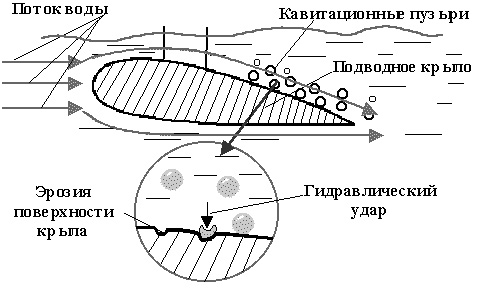 При движении подводного крыла в воде, на его верхней поверхности образуется зона пониженного давления. Это способствует возникновению воздушных пузырьков, этот эффект называется – кавитацией. Схлопываясь, воздушные пузырьки способны повредить крыло. Область низкого давления, достаточная для возникновения пузырьков, образуется при достижении судном определенной скорости.
При движении подводного крыла в воде, на его верхней поверхности образуется зона пониженного давления. Это способствует возникновению воздушных пузырьков, этот эффект называется – кавитацией. Схлопываясь, воздушные пузырьки способны повредить крыло. Область низкого давления, достаточная для возникновения пузырьков, образуется при достижении судном определенной скорости.
По возникновению кавитации, подводные крылья делятся на два типа:
- Бескавитационныые крылья. Их максимальная скорость, ниже скорости, необходимой для возникновения кавитации.
- Суперкавитирующие. Крылья для сверхскоростных судов. Профиль крыла выполнен таким образом, что кавитационные пузырьки схлопываются на расстоянии от поверхности крыла.
В 1956 году был разработан новый тип профиля крыла, призванный стать независимым от кавитации. Он представляет собой симметричный клин. При движении в жидкости на его гранях возникает положительное динамическое давление. На его внешней выпуклой стороне давление уменьшается, а на вогнутой – повышается. В области высокого давления, возникающей на выпуклой стороне искривленного клина, эффект кавитации отсутствует, а при больших углах атаки крыла, отгибы задних кромок затягиваю возникновение кавитации.
Особенности применения подводных крыльев
 Внедрение подводных крыльев привело к изменению архитектуры использующих их судов. Для уменьшения аэродинамического сопротивления корпуса, суда данного типа стали обтекаемых форм. Из-за малой грузоподъемности, основное назначение таких кораблей стала перевозка пассажиров и экскурсии, их внутреннее расположение салона, соответствует салону самолета.
Внедрение подводных крыльев привело к изменению архитектуры использующих их судов. Для уменьшения аэродинамического сопротивления корпуса, суда данного типа стали обтекаемых форм. Из-за малой грузоподъемности, основное назначение таких кораблей стала перевозка пассажиров и экскурсии, их внутреннее расположение салона, соответствует салону самолета.
Рулевая рубка (капитанский мостик) располагаются в носовой части корабля для улучшения обзора при прохождении извилистых рек. Хозяйственные помещения, размещаются между пассажирским салоном и машинным отделением, тем самым ослабляя шум двигателей (проникающий в салон) и повышая комфорт пассажиров.
Для проектирования судов на подводных крыльях, были разработаны новые методики разработки корпуса. С учетом увеличенного изгибающего момента. К тому же, особенности эксплуатации предполагают сильные удары волн о корпус, в режиме глиссирования судна.
Все эти факторы определяются конструкцией крыльевого устройства, особенно носового. В результате применения подводных крыльев, разработанных под руководством доктора технических наук, профессора Н.В. Маттеса, удалось снизить динамические нагрузки на корпус до 50 – 60%.
Подводные крылья и корпус судна, в среднем составляют 45 – 55% от его порожнего веса. Поэтому оптимальными материалами для создания глиссеров являются легкие и прочные сплавы алюминия и нержавеющая сталь, для изготовления крыльев. В настоящее время на многих малых судах применяются крылья из стеклопластиков с армированием, позволяющие значительно уменьшить вес судна.
Технология изготовления судов на подводных крыльях очень дорогая. Поэтому в отдельных случаях, конструкторы идут на ухудшение гидродинамических характеристик, уменьшая стоимость постройки корабля. Например, клепаные сочленения корпусов заменяются сварными соединениями. Это утяжеляет конструкцию в целом, но многократно снижает трудоемкость и стоимость работ.
Способы управления подводными крыльями
Управление выталкивающей силой на судне с подводными крыльями осуществляется изменением угла атаки крыла, либо закрылками. В настоящее время, все системы управления – автоматизированы. Оператор производит лишь грубое управление – поворот, замедление и ускорение судна, а стабилизацию движения обеспечивает центральный процессор управления судном. Получая информацию о положении судна с датчиков, он передает сигналы на изменение угла атаки крыла или закрылок. Удерживая судно в заданном оператором положении. Для глиссеров применяются только самые быстродействующие процессоры и датчики, так как время прохождения и обработки сигнала на больших скоростях, должно быть минимально.